Mehrere Wege nach „Rom“…
H-Brücken mit Relais, Transtoren und MOSFET im Vergleich
Drei Varianten Recht/Lauf von DC Motoren
🔍 Funktionsbeschreibung
Mit diesen drei Varianten lassen sich DC Motoren ansteuern, die Laufrichtung kann geändert werden. Mit oder ohne Endschalter, je nach Bedarf.
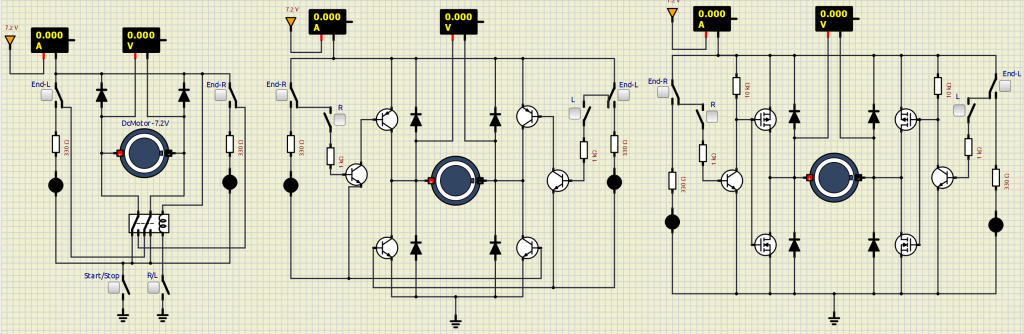
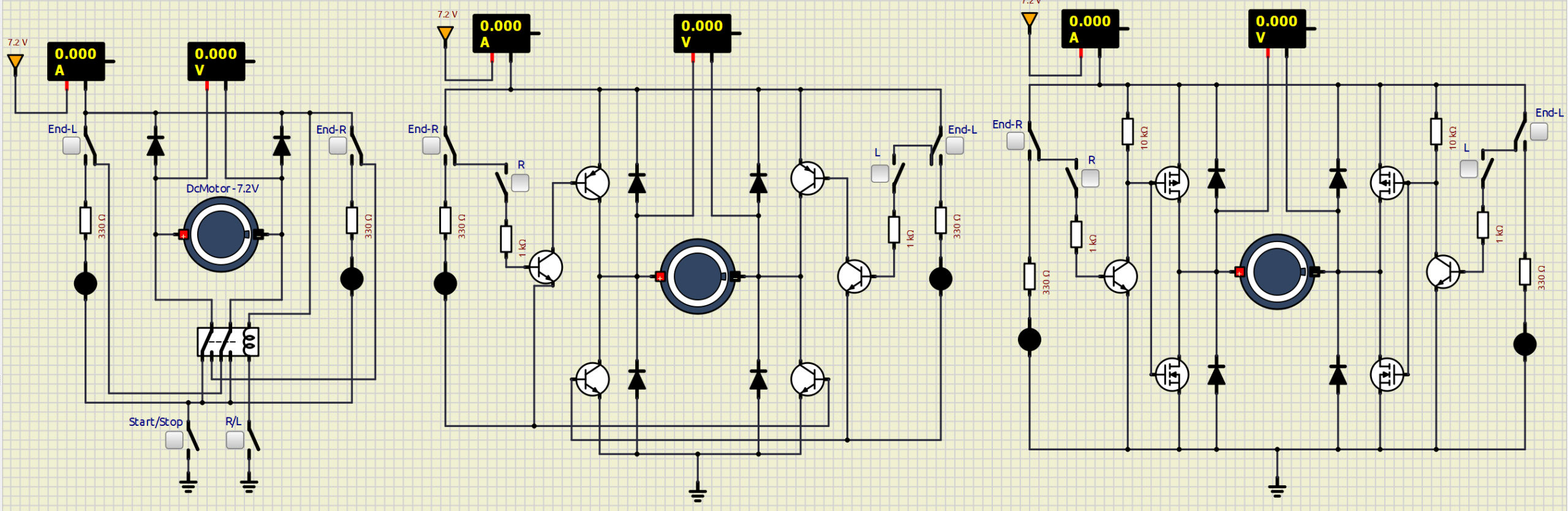
⚙️ Vergleich der H-Brücken-Schaltungen
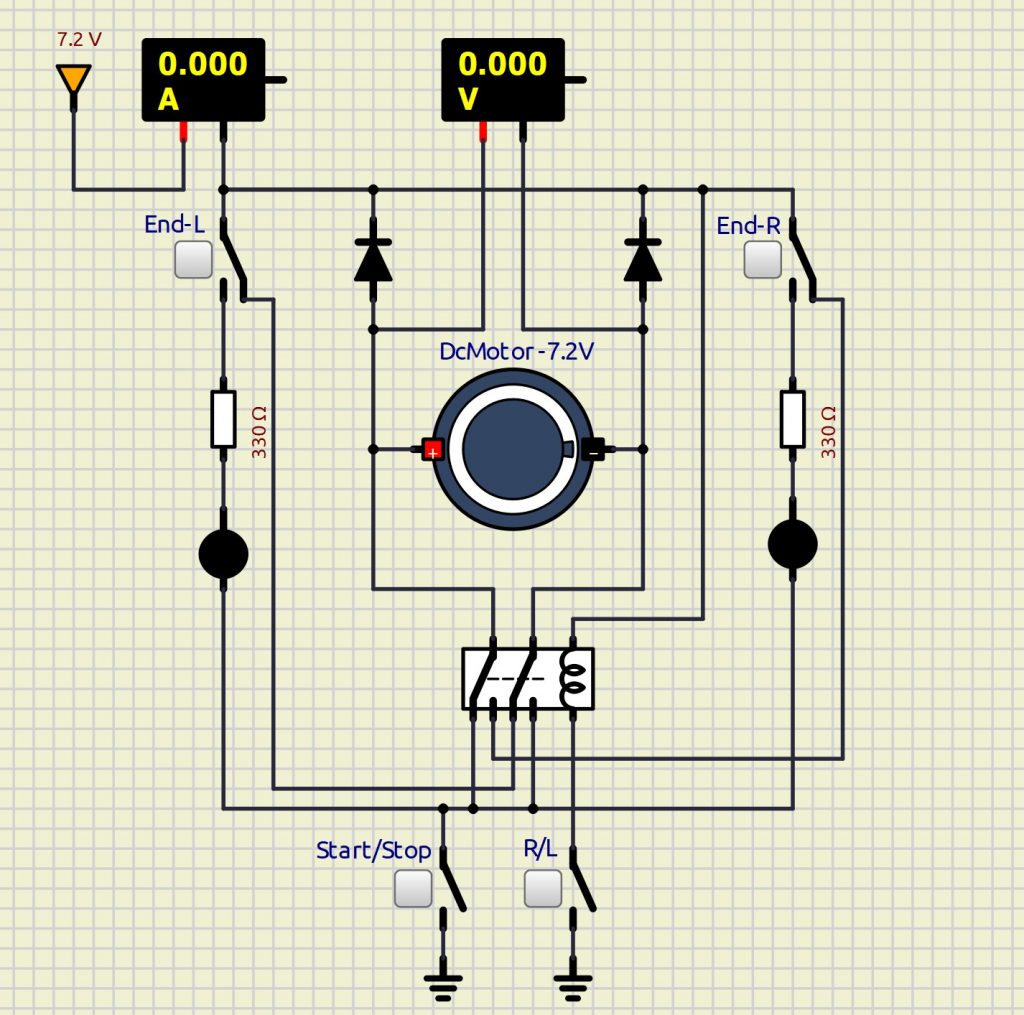
🔹 1. Relais-H-Brücke (Bild links)
Funktion:
Die Laufrichtung des Motors wird durch ein Doppel-Umschaltrelais realisiert. Das Relais vertauscht die Polarität der Motorspannung. Die Endschalter (End-L, End-R) unterbrechen den Stromkreis bei Erreichen der Endposition.
Start/Stop schaltet die Versorgung komplett aus. R/L legt die Drehrichtung fest.
Stromverhalten:
Im Betrieb links fließt der Motorstrom direkt über die Relaiskontakte (hier ca. 70–100 mA bei 7,2 V, je nach Motorlast). Im Betrieb rechts fließt zusätzlicher Strom über die Relaisspule (je nach Relais 10-50 mA).
Durch die mechanischen Kontakte ist der Übergangswiderstand gering.
Beim Umschalten unter Last entstehen kurzzeitig Spannungsspitzen → Dioden oder RC-Schutz empfehlenswert.
Vorteile:
✔ Sehr einfach und robust
✔ Hoher Motorstrom möglich
✔ Endschalter leicht integrierbar
Nachteile:
❌ Mechanischer Verschleiß
❌ Langsames Schalten, kein PWM
❌ Geräuschentwicklung
❌ Relais Stromverbrauch
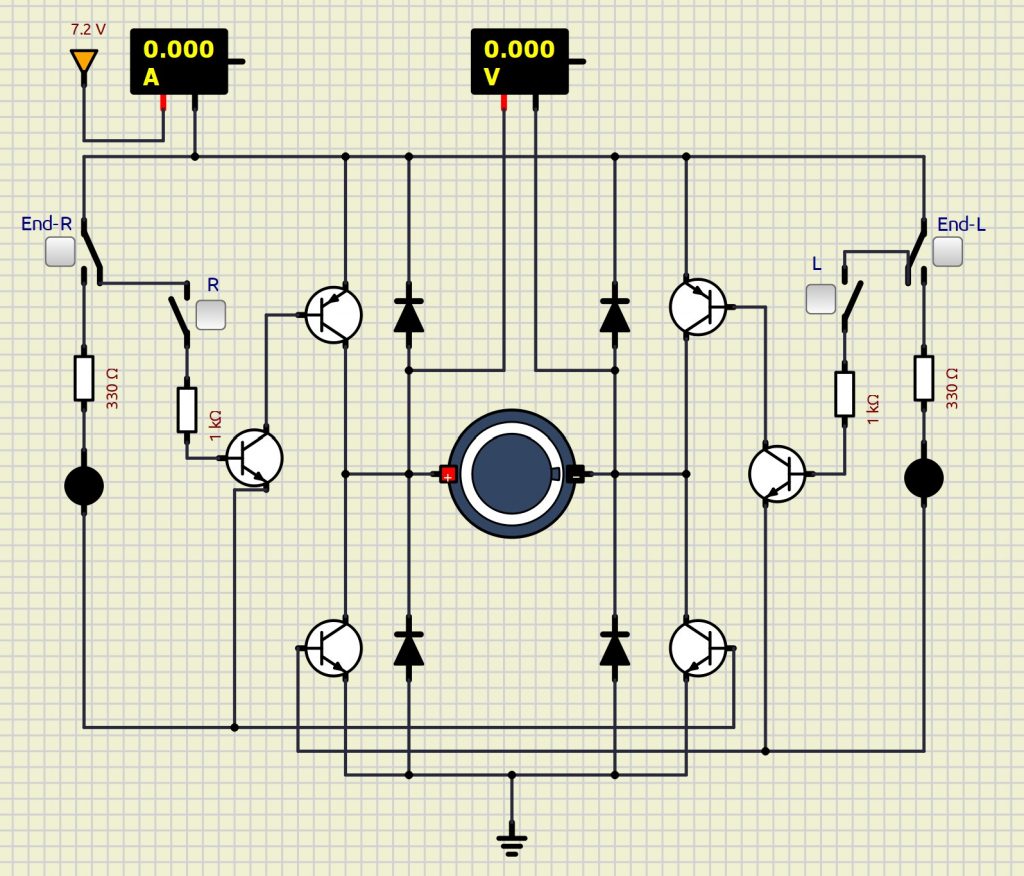
🔹 2. Transistor-H-Brücke (BJT-Version, Bild Mitte)
Funktion:
Vier Transistoren (je zwei NPN + zwei PNP) bilden die H-Brücke. Über die Steuersignale L und R werden diagonal gegenüberliegende Transistoren durchgesteuert. Der Motor erhält dadurch wahlweise positive oder negative Polarität.
Stromverhalten:
Motorstrom fließt durch zwei Transistoren (z. B. ein PNP und ein NPN) in Reihe. Jeder Transistor verursacht einen Spannungsabfall von etwa 0,7 V → insgesamt ~1,4 V Verlust. Dadurch reduziert sich die effektive Motorspannung (z. B. 7,2 V – 1,4 V ≈ 5,8 V).
Ruhestrom gering, Schaltgeschwindigkeit hoch → PWM-Regelung möglich.
Vorteile:
✔ Keine mechanischen Teile
✔ Gute Schaltgeschwindigkeit
✔ Einfach mit Logikpegeln steuerbar
Nachteile:
❌ Wärmeentwicklung durch Spannungsabfall
❌ Geringere Effizienz
❌ Begrenzter Maximalstrom
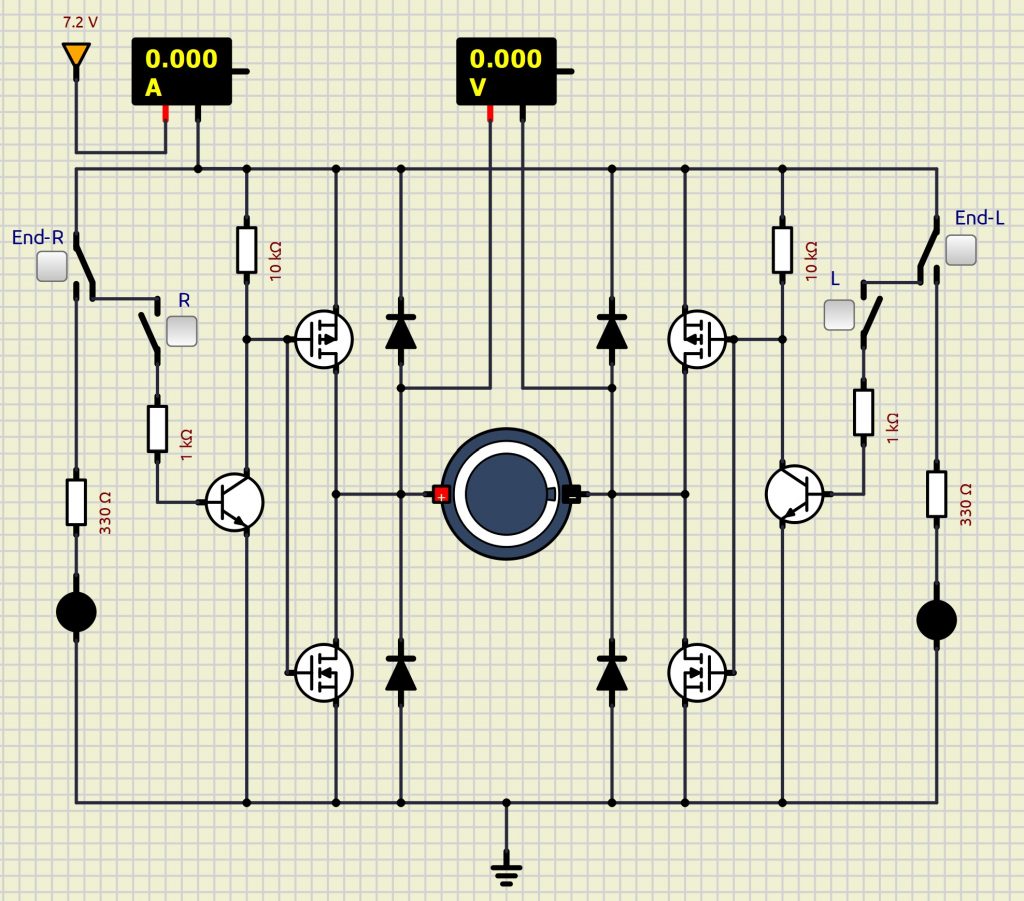
🔹 3. MOSFET-H-Brücke (Bild Rechts)
Funktion:
Vier MOSFETs (z. B. 2× N-Kanal + 2× P-Kanal oder alle N-Kanal mit Treibern) schalten den Motorstrom elektronisch.
Endschalter und Steuersignale (L, R) bestimmen die Richtung. Freilaufdioden schützen vor Rückströmen beim Abschalten.
Stromverhalten:
Der Motorstrom fließt durch MOSFETs mit sehr niedrigem R_DS(on) (typ. < 0,1 Ω). Dadurch ist der Spannungsverlust minimal (nur wenige mV). Sehr schnelles Schalten → PWM-Betrieb und Drehzahlregelung möglich. Dioden übernehmen kurzzeitig den Strom beim Umschalten (Freilaufpfad).
Vorteile:
✔ Sehr hoher Wirkungsgrad
✔ Ideal für PWM-Drehzahlregelung
✔ Keine Wärmeverluste bei niedrigen Strömen
✔ Keine mechanischen Verschleißteile
Nachteile:
❌ Aufwendigere Ansteuerung (Gate-Spannung beachten)
❌ Gefahr von Kurzschlüssen bei falscher Logik
❌ Empfindlicher gegenüber statischer Aufladung
Simulation der Schaltung (YouTube)
Schreibe einen Kommentar